Skip to content
Secret Science Lab
Tag Archives:
arduino
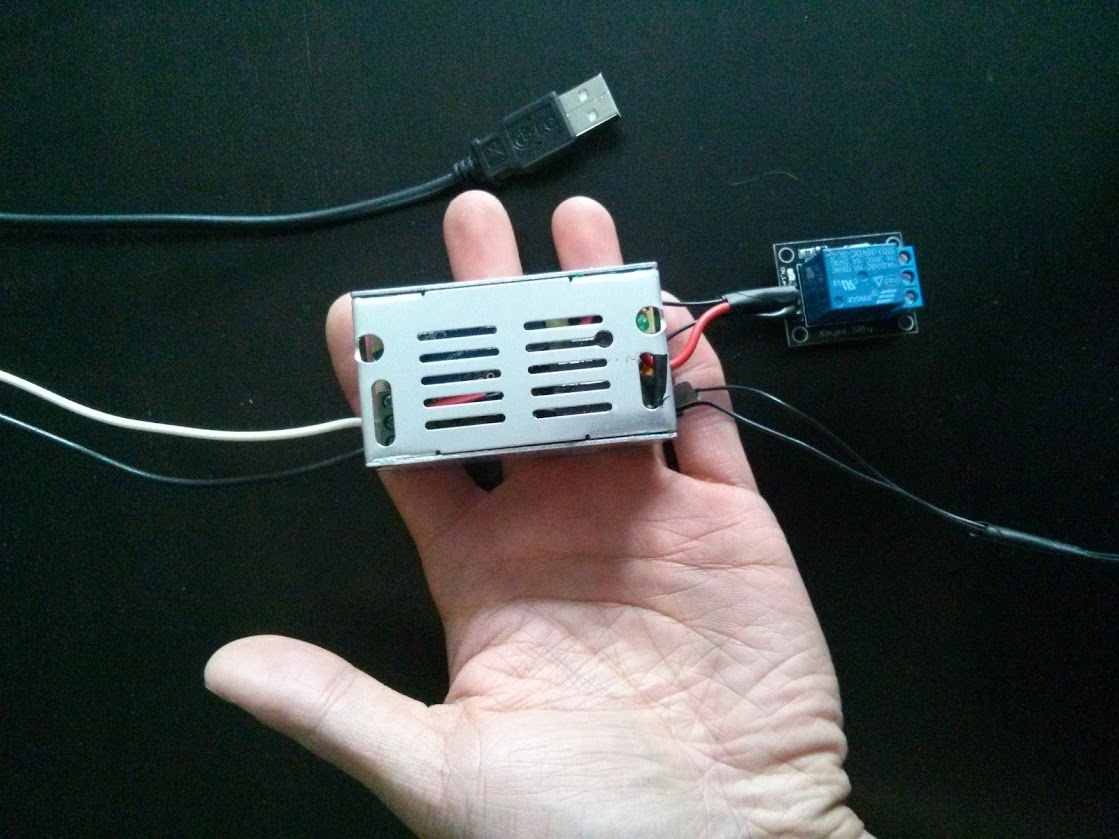
DIY home automation almost-instant-response WIFI smart switch for < $16 with MQTT